Human-machine-collaboration
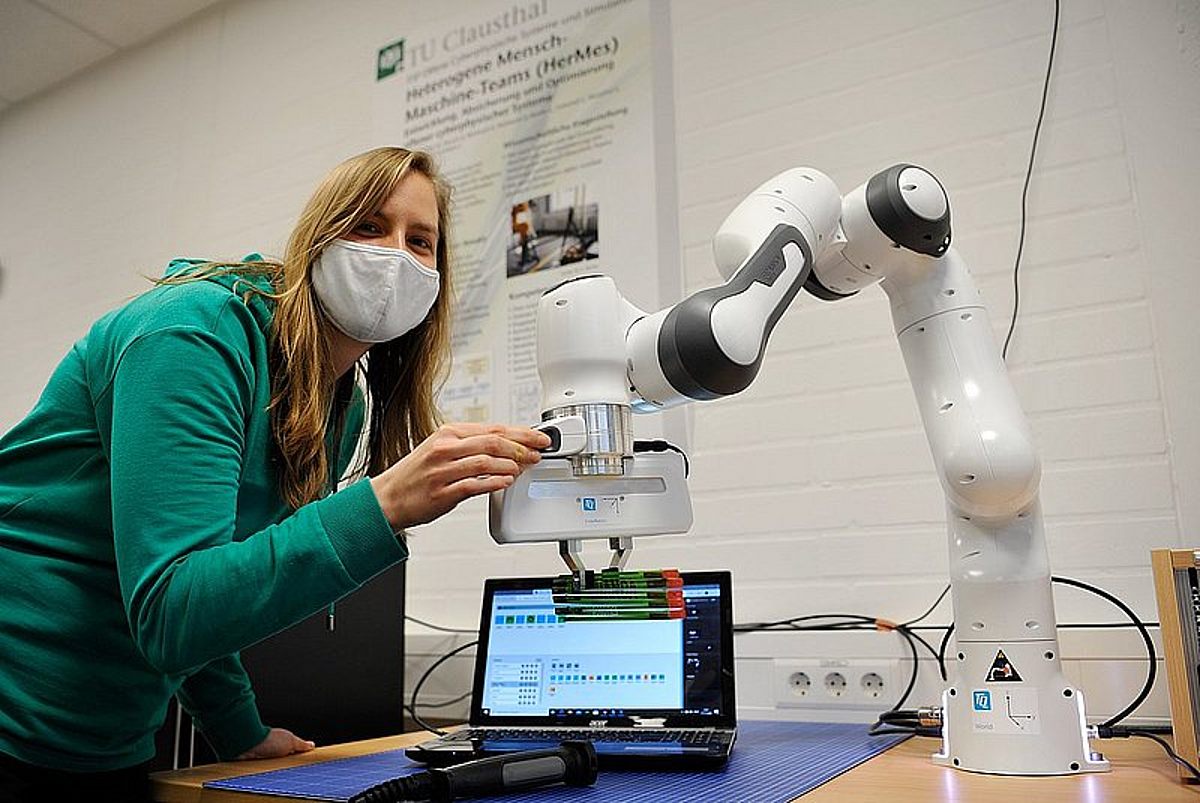
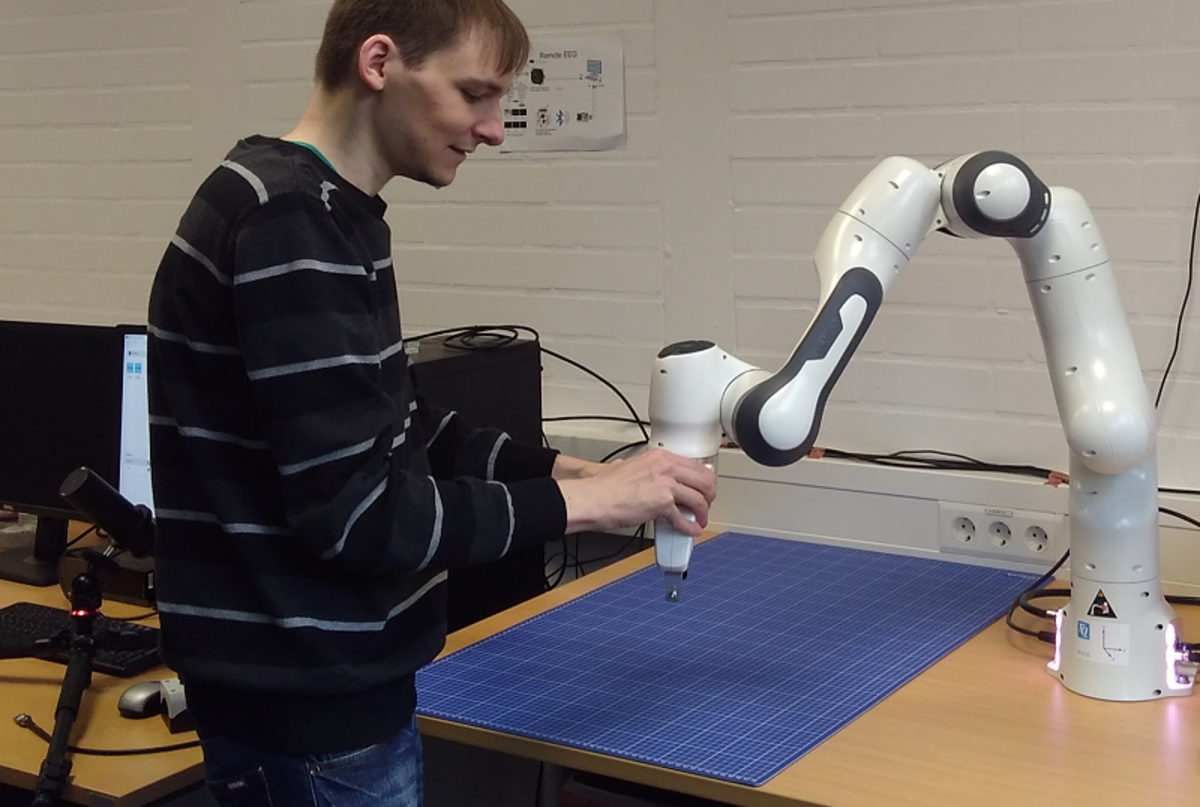
Since the summer of 2020, the interdisciplinary research project Heterogeneous Human-Machine Teams (HerMes) has a Cobot of the latest generation. As part of the research focus OCSS, a demonstrator, illustrating a collaborative industrial disassembly process, will be built in the premises of the SWZ (VR-Laboratory), to enable investigations of open research questions and implementations of new solution in a realistic environment. Progress in areas such as the safe handover of dangerous workpieces, e.g. open batteries, and the sensor technology and AI required to assess the process control capability of humans, are prerequisites for the path towards true human-machine-teams. The HerMes team is researching models, software and hardware that will enable a holistic description of both the human-machine-team and the efficient use of resources in scenarios with multiple, dynamically assembled HMTs.
Technical specifications
The demonstrator uses the "Panda" by Munich-based developer Franka Emika, the first Cobot in the world to be CE-certified for collaborative tasks. Torque sensors in each of the 7 axes allow intrinsically safe teamwork. The sensor technology is extended by self-developed systems using a Microsoft Kinect for stereoscopic positioning of the human partner, and further cameras e.g. for monitoring situation awareness and attention. The demonstrator is controlled by a 16-core HEDT system, which provides the necessary processing power for the evaluation of image data or AI calculations in real time.
- Panda:
Axes: 7
Payload: 3 kg
Max. reach: 855 mm
Max. velocity: 2 m/s at the end effector
Hand: Parallel gripper with max. force of 140 N
Torque sensors in all axes
- HEDT-System:
CPU: AMD Ryzen™ 3950X CPU @ 3.50GHz (16 cores)
RAM: 64 GB
Graphics card: NVIDIA GeForce RTX 2070 Super AMP
Stereo camera: Microsoft Kinect V2
SA camera: IDS UI-3270CP Rev2
Workspace camera: AV Stingray F201C
Cobot CoRA ist das jüngste Teammitglied im TU-Leitprojekt HerMes
Die Promovierenden und Professor/innen im Forschungsprojekt „Heterogene Mensch-Maschine Teams“ (HerMes) freuen sich über einen neuen Kollegen. Der Kollaborative Roboter (Cobot) CoRA ist das Herzstück eines interaktiven Demonstratorsystems, mit dem das HerMes-Team seine interdisziplinäre Forschung zur Mensch-Maschine-Interaktion in praxisnaher Umgebung durchführen kann. [...]
Vollständige Meldung siehe: TU-Homepage